Papers
The Human-Robot Ensemble: Designing Expressive Movements for Restaurant Service Robots
Authors: Hyunmin Lee, Nazli Cila, Klaas Koerten, Maaike Bleeker, Marco Rozendaal //
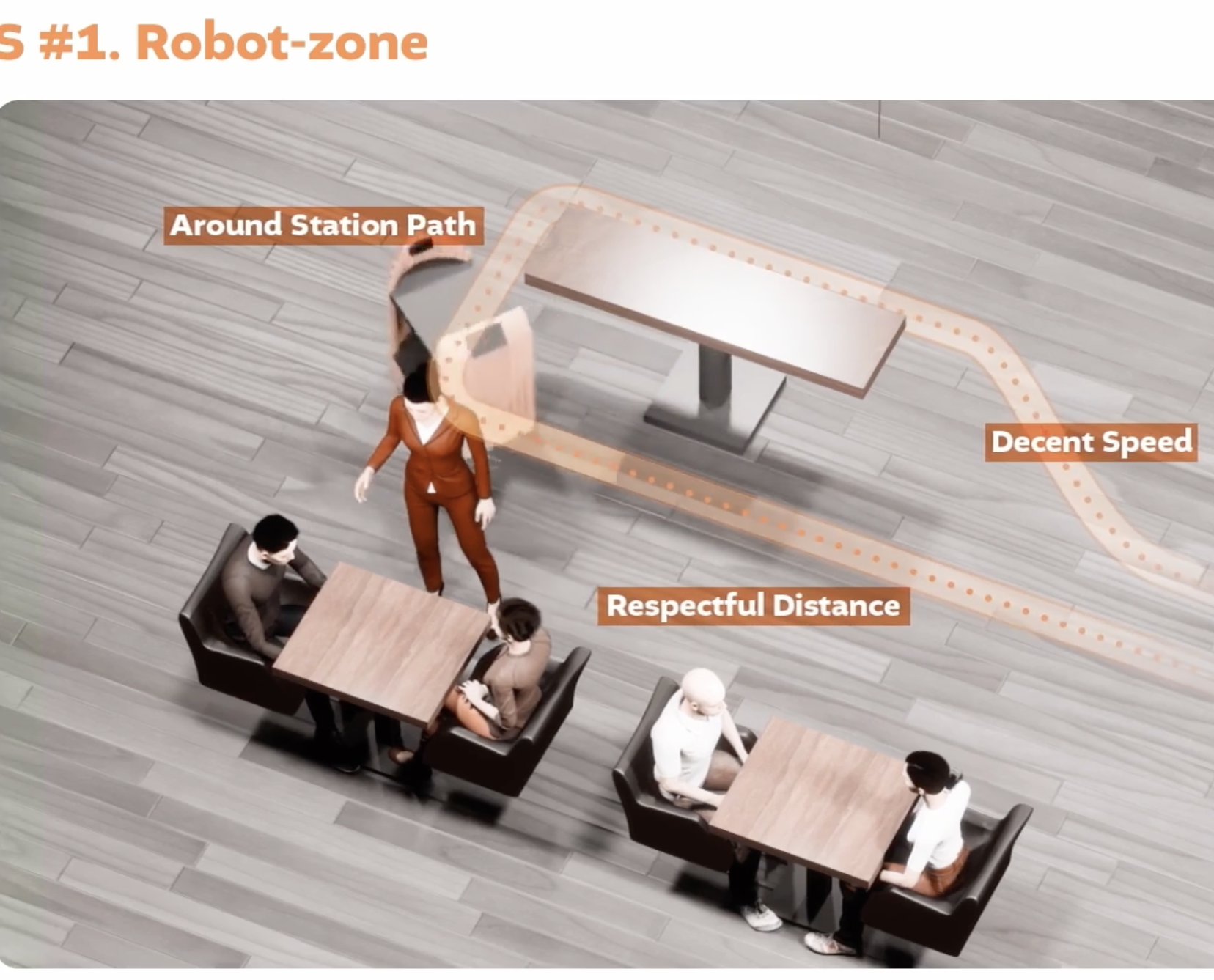
This paper explores the design of expressive movements for service robots in fine-dining restaurants, using a performative approach to understand how robots can be integrated and accepted in complex real-world settings. Drawing on dramaturgical principles, we conducted three research and design activities-speculative enactments, scenario building, and extended reality (XR) simulations-to examine how specific movements of a restaurant service robot and the contexts in which they are performed influence the experiences of guests, serving staff, and managers. We propose that such robots can be conceptualized as “ensemblists,” capable of adopting multiple roles and collaborating with humans in a larger choreography of service delivery. The study concludes by reflecting on the strengths and limitations of performative approaches in HRI, emphasizing the need to move beyond traditional one-on-one human-robot interaction models and, instead, to consider how robots perform their roles in complex, dynamic environments involving multiple actors.