Blogs
The Dramaturgy of Robots on Stage | Blog by Bianca Gotti
VU Lecture by Laura Karreman and Ulrike Quade
On December 1st, 2025, Dr. Laura Karreman—Associate Professor in Media and Performance Studies at Utrecht University (UU)—and Ulrike Quade—theater director, artistic researcher, puppeteer, and scenographer—gave a lecture at the Vrije Universiteit Amsterdam (VU) titled The Dramaturgy of Robots on Stage. The lecture was presented in the context of the collaborative exchange project between the courses Socially Intelligent Robotics (VU) and Expanding Performance (UU). At the end of this collaboration—part of the larger research project Dramaturgy for Devices—VU students had to design and develop a performance with NAO robots, drawing on the dramaturgical advice provided by UU students.
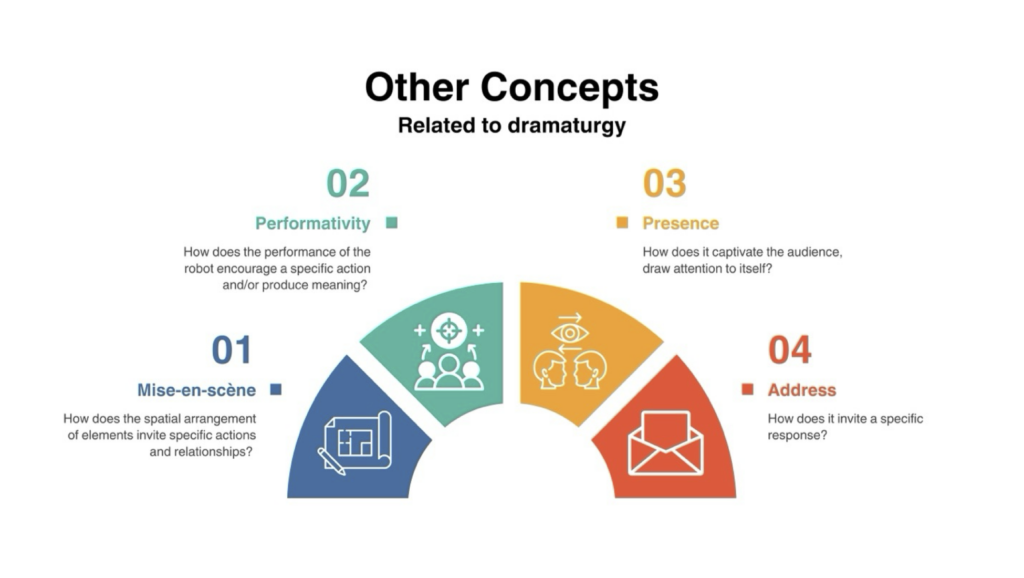
The lecture aimed to equip students with concepts, tools, and practical examples from theater to further develop their performances and was divided into two parts. In the first, Laura introduced the core concept of dramaturgy alongside the four related notions of performativity, mise-en-scène, presence, and address (Bleeker and Rozendaal 2021) and concluded with examples of theater performances in which robots take on the role of main performers. In the second part, Ulrike offered additional insights into how to work with robots on stage by discussing some of her most recent works and showcasing how puppeteering can help develop robotic performances through a practical demonstration.
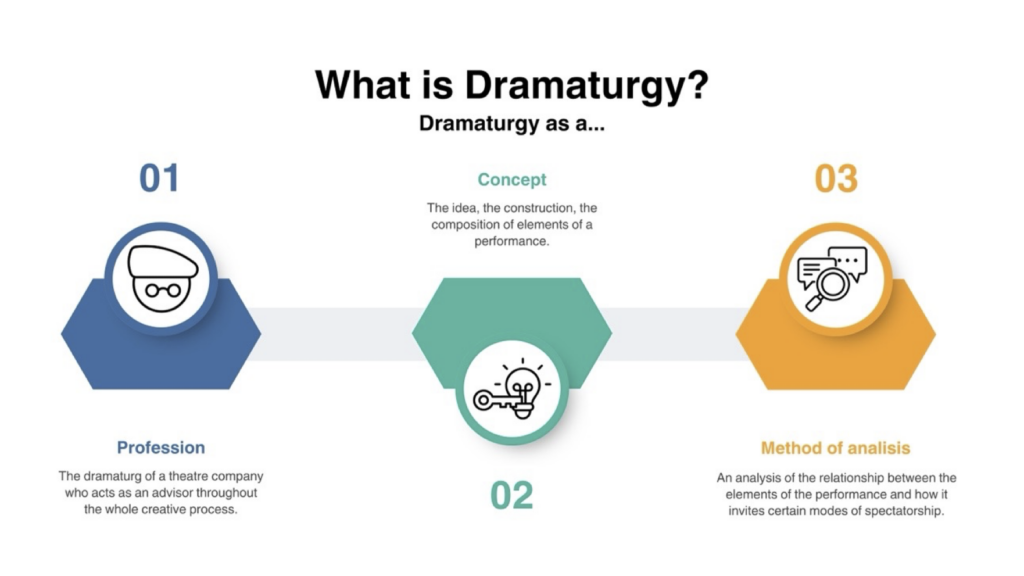
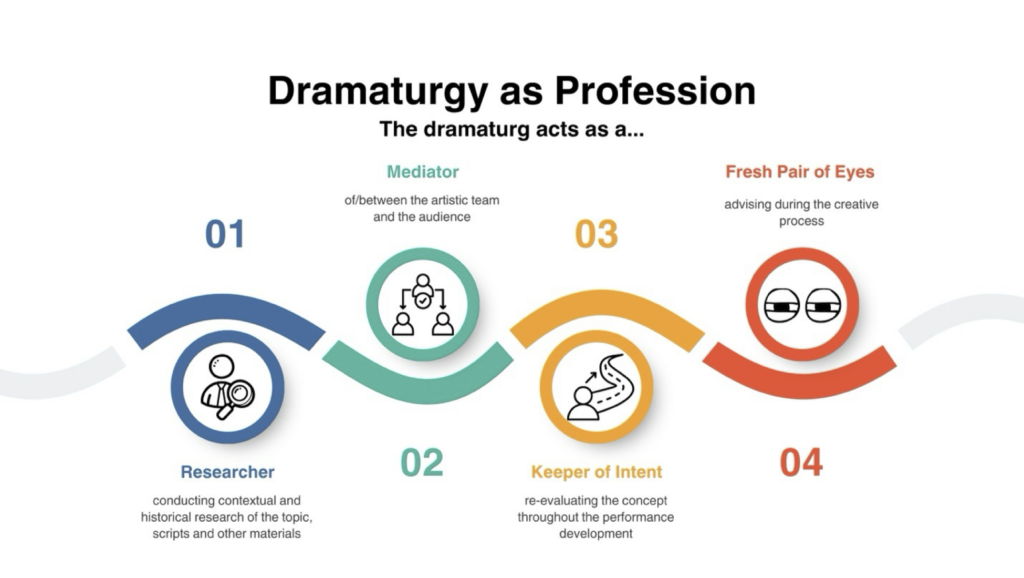
As discussed by Laura, dramaturgy can take on three different meanings: a profession, a concept, and a method of analysis. As a profession, it refers to the profession of the dramaturg, who acts as an advisor throughout the whole creative process. This includes conducting the preliminary research, guiding and making choices during the creation of the script and the overall performance, and mediating between the play and the audience. The dramaturg supervises the performance from its inception to its final form, making sure that it is coherent in its intended aim and making adjustments if necessary. In the second sense, dramaturgy refers to the performance’s underlying idea, the different elements that contribute to conveying its message. In the third sense, dramaturgy refers to a type of analysis that looks at how the construction of the performance works in practice, taking into consideration the relationship between its elements and the modes of spectatorship it invites.
After this theoretical introduction, Laura discussed three different examples of performances in which robots act as performers on stage. The first performance was R.U.R. (1920), written and directed by Karel Čapek. Standing for Rossum’s Universal Robots, R.U.R. is a Czech science fiction performance where the word ‘robot’ originated—from ‘robota,’ which in Czech means drudgery or servitude—the root is also found in ‘robotnik’ meaning ‘worker, serf, or peasant (Reilly 2011, 148). In R.U.R., robots are interpreted by human actors, and the plot follows what nowadays seems cliché: machines revolt against their creators and destroy humanity. The second performance was Uncanny Valley (2018), realized by the art collective Rimini Protokoll and directed by Stefan Kaegi. In this work, an animatronic double of writer Thomas Melle discusses matters of identity, (unstable) sense of self, and authenticity. The third performance was DANCER #3 (2010), realized by A Two Dogs Company and directed by Kris Verdonck. Compared to the other two, this performance is radically minimalistic: there is no text nor additional elements on stage but just a small robotic device that jumps and, when it falls, is lifted by a wire descending from the ceiling, ready to jump again.
These performances are very different in their mise-en-scène, text, modes of presence and address, and types of robots used. Nevertheless, they each express technocultural imaginaries—the hopes, fears, and cultural narratives that accompany technology and its developments. R.U.R. stages fears related to World War I and the rise of industrialization prompting reflections on the obsolescence of humans and their becoming increasingly similar to machines. Uncanny Valley manifests the uncanny relationship between a copy and its original, reflecting anxieties dominating our contemporary times where the boundaries between humans and machines become less clear and technology is increasingly able to mimic “real” human presence. DANCER #3 invites us to reflect on how we perceive robots. While we know that we are looking at an inanimate object, we cannot but project human qualities onto its movements. Its jumping and falling become trying and failing, as if moved by intention and agency intention. Taken together, these examples show that a robot is never simply a machine but a container and mirror of our own nature, fears, and desires.
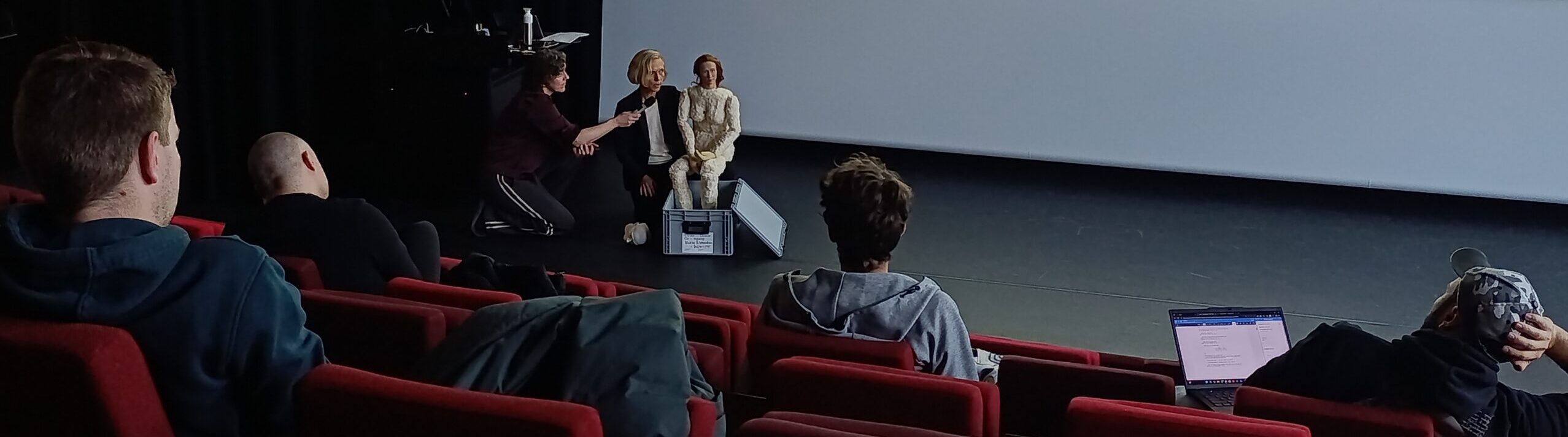
As Ulrike Quade explained during the second part of the lecture, her practice is always oriented toward worldbuilding and thought experiments, and her most recent work makes extensive use of robots on stage. Whether working with a robot, a puppet, or a human, she approaches her characters in terms of relationality, focusing on how they are connected to each other and their surroundings. She discussed examples from her practice while expanding on the concepts presented by Laura. In Spot x Kafka (2024)—a theatrical exploration of humanity, technology, and their entanglement—central are the themes of identity and transformation. By conceiving the robotic performance as a process of becoming and by playing with different scales—alternating a full-size Spot robot and a miniature version of it—she invites the audience to look at and relate to the robot differently depending on its relationship with the human actor and the surrounding spatial composition. She then turned to Rocky the Robot (2022) to expand on the concept of mise-en-scène. The plot is about a robot that falls in love with a flower and on stage humans, robots, and objects co-create meaning through multiple perspectives. The audience is invited to adopt the points of view that populate this hybrid world, inviting their attention to move between different elements.
A central point made by Ulrike is that the puppet is the predecessor of the robot and that a deeper understanding of how to work with robots on stage might be gained by returning to their ancestors. Through a short demonstration, Ulrike exemplified how techniques borrowed from puppeteering might be used to direct presence and shape address. Drawing from her research and experience with Bunraku theater, she showed how, when the performer is on stage with a puppet, 80% of the attention is focused on the puppet, while 20% is focused on the performer. The advice she gave to the VU students was to believe in the liveness of the puppet and to focus one’s eyes on its actions. Indeed, when a performer focuses their attention on what the puppet is doing, the audience’s attention follows, increasing the illusion that it is moved by a need, an urgency, and an intention.
The variety of performances mentioned during the lecture showcased the many different ways through which one can think of and design robots and performances highlighting and that meaning does not emerge from technological sophistication but from creative decisions. During the Q&A session that closed the lecture, Laura and Ulrike invited VU students to turn their attention from technical challenges to artistic possibilities, playing with limitations they might encounter while working with the NAO robots. Students were encouraged to experiment with modes of presence and address, and to treat robots as partners in worldbuilding. This approach aligns with the ambitions of Dramaturgy for Devices, pointing toward a future in which theatre and robotics mutually inform one another, enriching both fields through shared inquiry and imaginative practice.
References
Bleeker, Maaike and Marco C. Rozendaal. 2021.“Dramaturgy for Devices: Theatre as Perspective on the design of smart objects.” In Designing Smart Objects in Everyday Life, edited by Marco C. Rozendaal, Betti Marenko, and William Odom. 43–56.
Reilly, Kara. 2011. “From Automata to Automation: The Birth of the Robot in R.U.R. (Rossum’s Universal Robots).” In Automata and Mimesis on the Stage of Theatre History. Palgrave Macmillan, London. 148-176. https://doi.org/10.1057/9780230347540_6